- 头条《电工技术学报》优秀论文|改进型偏差耦合多电机转速同步控制导语传统偏差耦合多电机同步控制系统中,系统的跟踪性能与同步性能相互耦合,难以兼顾,尤其在多电机系统起动阶段,转速同步误差较大。针对以上问题,本文运用线性系统校正原理设计了改进型偏差耦合控制结构,实现了系统的同步性能与跟踪性能的解耦调节,有效提升了系统起动阶段的性能。
《电工技术学报》2019年度优秀论文获奖论文简报
《光伏发电出力预测技术研究综述》等15篇优秀论文入选《电工技术学报》2019年度优秀论文,荣获中国电工技术学会表彰。现将部分获奖论文的文章简报分享给各位读者,以期促进本领域的技术交流。
团队介绍

天津工业大学“高效能电机系统智能设计与制造”国家地方联合工程研究中心紧密围绕国家和天津市在智能制造领域的战略部署和主攻方向,发挥在技术创新层面的主导作用,开展高效能电机系统智能设计与制造领域的前瞻性研究。中心设立了高效能电机系统智能设计与结构优化、高效能电机系统电力电子变流与驱动、高效能电机系统实时检测与智能控制、高效能电机系统智能制造与产业化应用等主要发展方向,通过开展产学研合作交流,提升高效能电机系统领域先进材料、工艺及配套技术的工程化与产业化,力求解决国内高效能电机系统设计、控制及制造面临的瓶颈问题。

耿强
1978出生,教授,博士生导师,入选天津市“131创新型人才培养工程”、天津市高校“中青年骨干创新人才培养计划”;担任中国电工技术学会电控系统与装置专委会委员、中国自动化学会电气自动化专委会委员、国家自然科学基金通讯评议专家等。主持国家自然科学基金面上项目、天津市自然科学基金重点项目、天津市教委科研计划重点项目等;作为主要参加人参与国家自然科学基金重大项目、科技部973计划项目、国家自然科学基金面上项目、中国工程院咨询研究重大项目等。研究成果发表SCI/EI收录论文40余篇;授权发明专利20余项;获省部级科技特等奖1项、一等奖3项。
研究背景
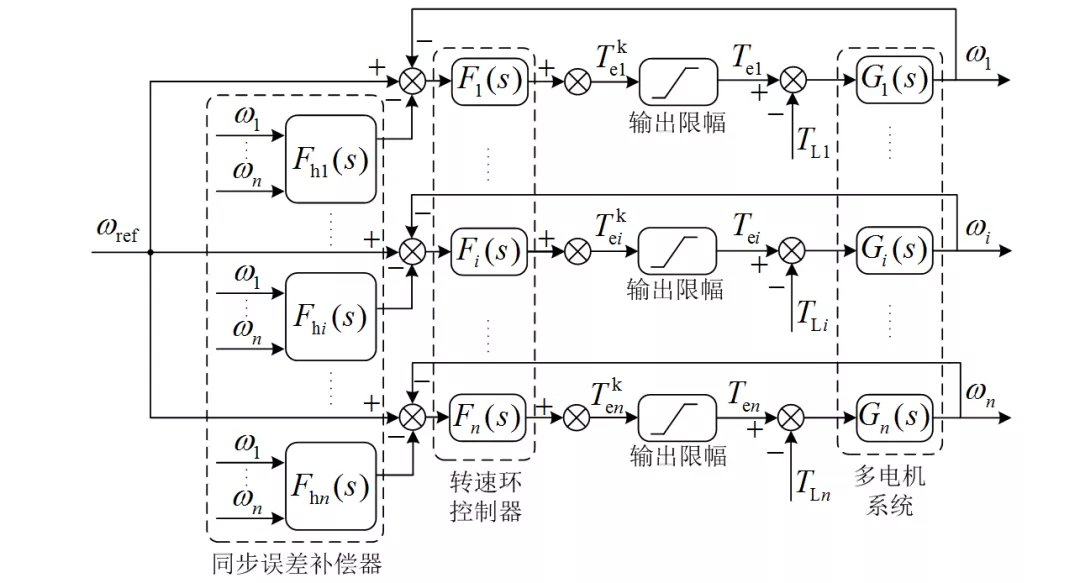
图1 传统偏差耦合控制结构示意图
偏差耦合控制结构因可靠性好、耦合程度高、可控电机数量多而被广泛用于多电机转速同步控制场合。但传统结构需要将系统中所有电机的速度信号分别输入到各自电机前端补偿模块中进行相关运算,转速补偿机制较为复杂;并且由于转速环控制器参数的选择会同时影响系统的跟踪性能与同步性能,所以在保证系统快速性与稳定性的前提下难以同时兼顾系统的同步性能。
论文方法及创新点
本文提出了一种结构较为简单,同步性能较好的改进型偏差耦合控制结构,为简化分析,忽略电流环延迟和测速延迟,其结构如图2所示。
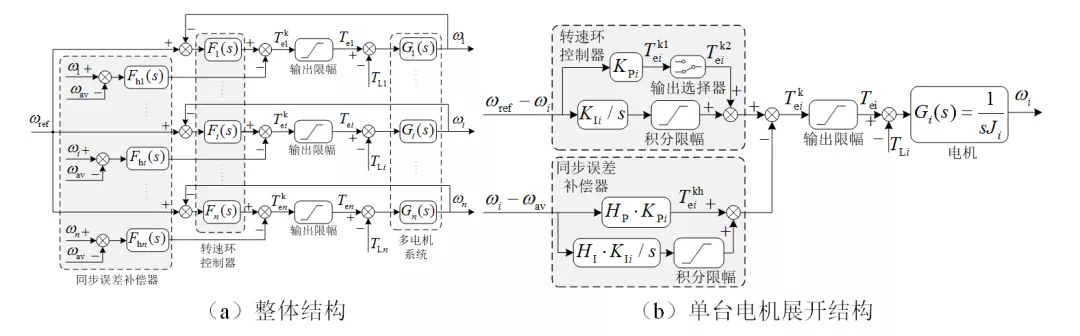
图2 改进型偏差耦合控制结构示意图
所提改进型偏差耦合结构下的多电机系统主要由三部分构成:转速环控制器、同步误差补偿器以及多电机系统。对于多电机系统而言,为简化分析,将系统中每台电机的传递函数视为积分环节,经推导可得任意两台电机之间的同步误差为
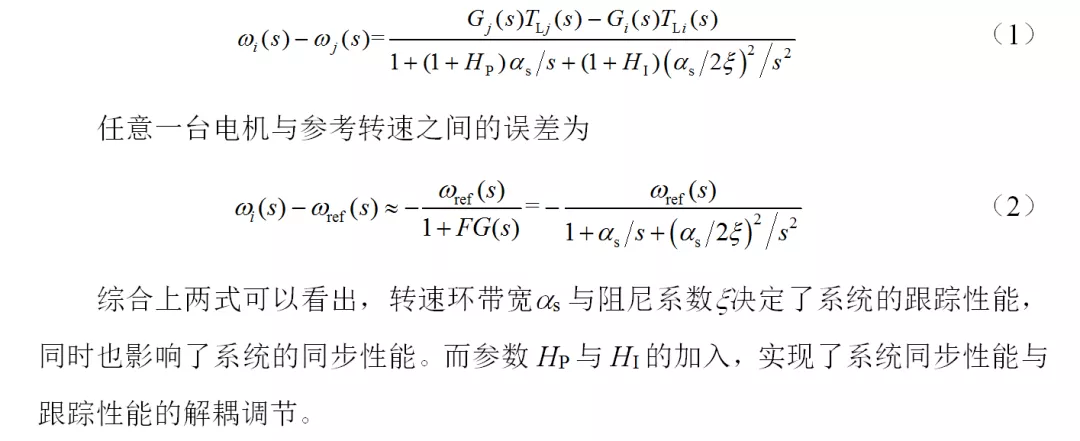
为了得到改进型偏差耦合结构在不同HP与HI的参数取值下,系统同步性能的动态性能,以改进型偏差耦合结构为基础,进行3台永磁同步电机的仿真,结果如图3所示。
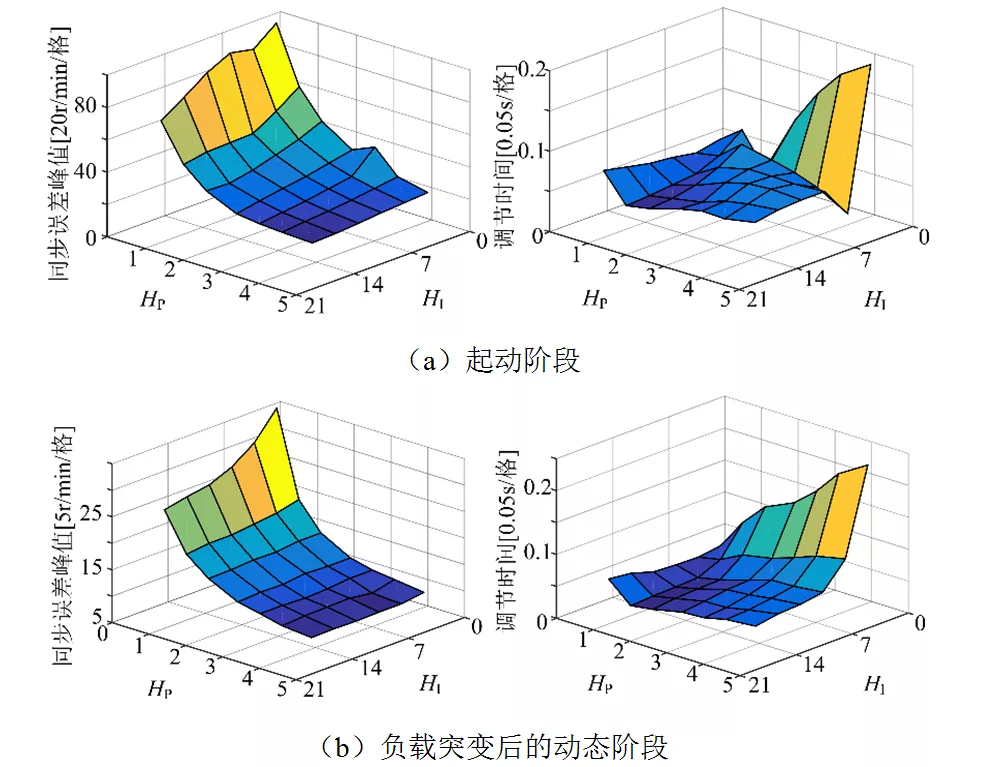
图3 改进偏差耦合结构动态性能仿真
由图中可以看出,当3台电机所带负载不同时,无论是起动阶段还是负载突变阶段,系统同步误差峰值随着HP与HI的增大而逐渐减小,但同步误差调节时间却随着HP的增大而增大;在起动阶段,由于选择输出器的作用,调节时间随HP与HI的变化较为复杂,当HP比HI为某一较小比值时,调节时间较短。
依据上述理论分析与仿真结果,对系统参数进行了整定,并搭建了多电机实验平台进行实验验证,实验平台和起动阶段实验结果分别如图4、图5所示。
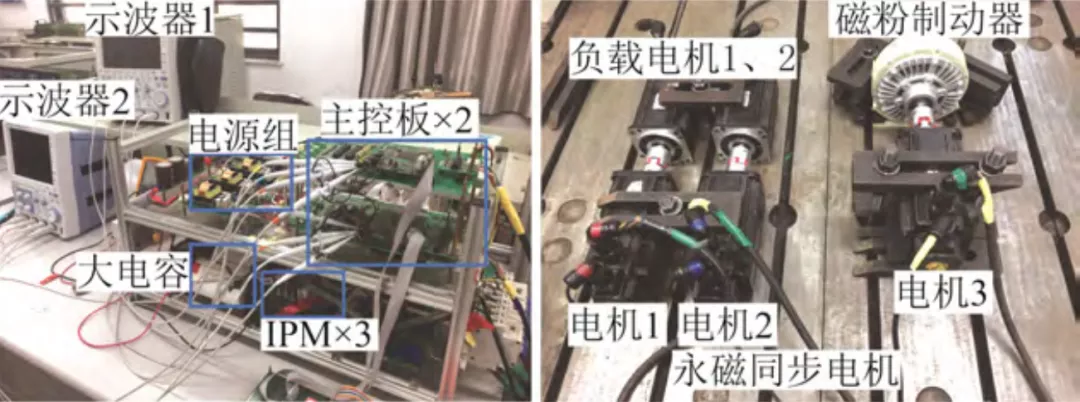
图4 多电机实验平台
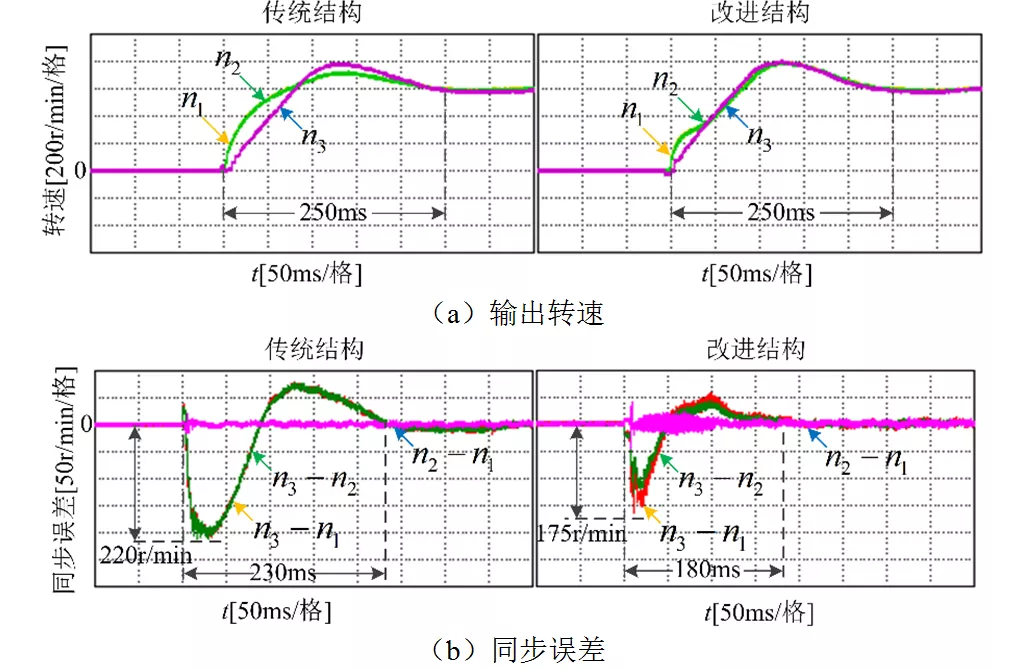
图5 两种结构在起动过程中的输出转速与同步误差
由图5(a)可以看出,与传统结构相比,改进结构的3台电机的调节时间保持不变;由图5(b)可以看出,在电机起动瞬间,改进结构的同步误差最大值相较于传统结构,缩小了约20%;并且,同步误差调节时间相较于传统结构,也减小了约20%。
结论
本文所设计的改进型偏差耦合结构适用于3台及以上电机且对同步性能有较高要求的多电机协同控制系统,其特点如下:
(1)设计了新型多电机系统偏差耦合控制结构,实现了系统同步性能与跟踪性能的解耦调节;
(2)采用比例-积分控制的同步误差补偿器替代了传统结构中只含比例控制的转速补偿环节,减少了误差的调节时间,使用自身转速与平均转速作为输入量,相对于传统结构减少了在线计算量;
(3)在转速环控制器中增加了选择输出器,电机负载不均起动时,在同步误差比例补偿量与限幅量的参与下,将转速环比例部分补偿量进行在线调节去饱和(使之小于限幅值),然后经同步补偿作用,使得平均转速以下的重载电机参考转矩相对较大,平均转速以上的轻载电机参考转矩相对较小,从而减小了起动阶段系统的同步误差。
引用本文
耿强, 王少炜, 周湛清, 史婷娜, 夏长亮. 改进型偏差耦合多电机转速同步控制[J]. 电工技术学报, 2019, 34(3): 474-482. Geng Qiang, Wang Shaowei, Zhou Zhanqing, Shi Tingna, Xia Changliang. Multi-Motor Speed Synchronous Control Based onImproved Relative Coupling Structure. Transactions of China Electrotechnical Society, 2019, 34(3): 474-482.



电厂关键技术研究及其应用”专题征稿通知.jpg)